
新疆农业科学 ›› 2021, Vol. 58 ›› Issue (10): 1909-1917.DOI: 10.6048/j.issn.1001-4330.2021.10.019
• 植物保护·土壤肥料·节水灌溉·农业生态环境·农业装备工程与机械化 • 上一篇 下一篇
杨征鹤1( ), 喻晨2, 杨会民2, 陈毅飞2, 周欣2, 马艳2, 王学农2,*()
), 喻晨2, 杨会民2, 陈毅飞2, 周欣2, 马艳2, 王学农2,*()
收稿日期:2020-11-20
出版日期:2021-10-20
发布日期:2021-10-26
通信作者:
王学农(1964-),男,陕西汉中人,研究员,硕士生导师,研究方向为农业机械化技术装备,(E-mail) xjwxn2010@sina.com作者简介:杨征鹤(1994-),男,山东菏泽人,硕士研究生,研究方向为设施农业装备, (E-mail) 247329956@qq.com
基金资助:
Zhenghe YANG1(), Chen YU2, Huimin YANG2, Yifei CHEN2, Xin ZHOU2, Yan MA2, Xuenong WANG2,*()
Received:2020-11-20
Published:2021-10-20
Online:2021-10-26
Supported by:摘要:
【目的】准确获取温室番茄作物行中单株冠层数据,为分析作物生长状态和为对靶喷药提供冠层数据支持。【方法】采用三维激光雷达(LiDAR)搭建番茄植株冠层检测平台,使用导轨以0.05 m/s的速度移动三维激光雷达,利用雷达上位机软件Ctrlview保存双侧扫描的A、B 2组共40株番茄植株点云。双侧点云使用ICP(迭代最近点)算法进行配准,利用基于特征值的平面拟合法去除地面,使用均值漂移算法(Meanshift)分割番茄行中的单株点云,获取冠层参数,与人工测量值比较验证精度,将单株点云在MATLAB中使用alpha shape算法进行重建并进行体积的获取,使用凸包算法作物参考值对比。【结果】该检测平台在激光雷达前进方向与垂直前进方向的测量误差分别为-2.65%、-3.95%;获取到的单株番茄植株高度与人工测量值相比,平均绝对误差分别为0.025和0.031 m;重建后求取的体积与凸包算法相比平均误差下降了约15.3%,与人工获取相比相差不大,各指标良好。【结论】番茄行点云分割结果与人工测量相比A、B 2组的均方根误差RMSE分别为0.039和0.043,冠层体积获取与参考值对比VRMSE为0.011 3,激光雷达在获取作物外形轮廓信息中具有一定的准确性和可靠性,该方法用于温室环境下单株作物冠层数据的获取。
中图分类号:
杨征鹤, 喻晨, 杨会民, 陈毅飞, 周欣, 马艳, 王学农. 基于LiDAR的温室番茄冠层几何参数提取[J]. 新疆农业科学, 2021, 58(10): 1909-1917.
Zhenghe YANG, Chen YU, Huimin YANG, Yifei CHEN, Xin ZHOU, Yan MA, Xuenong WANG. Geometric Parameters Extraction of Tomato Canopy in Greenhouse Based on LiDAR[J]. Xinjiang Agricultural Sciences, 2021, 58(10): 1909-1917.
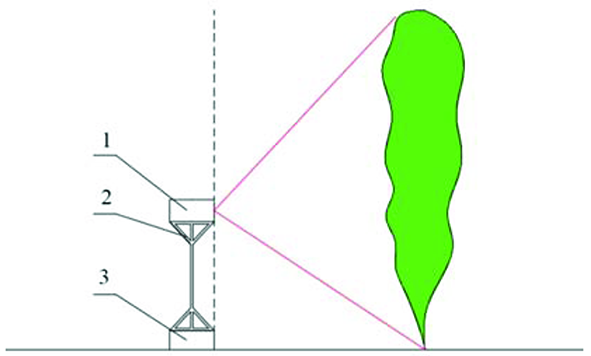
图1 激光探测平台结构示意 注:1.激光雷达部分;2.支架部分;3.导轨部分
Fig.1 Structure diagram of detection platform Note: 1. Lidar part; 2. Stents part ;3. Guide part
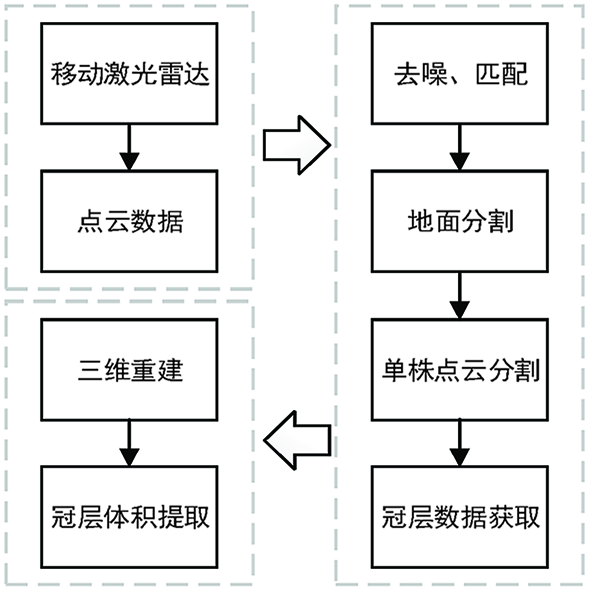
图2 数据处理流程
Fig.2 Data processing flow chart
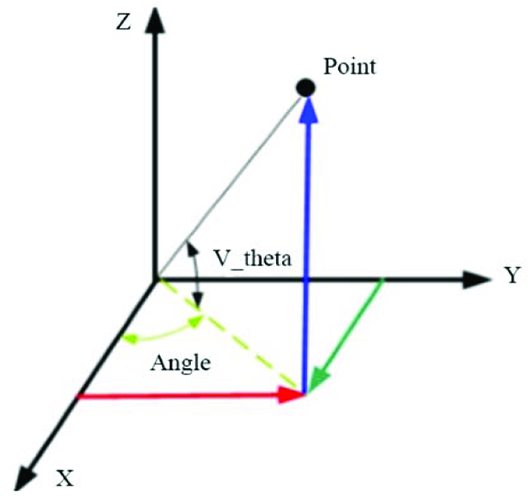
图3 坐标系与坐标参数
Fig.3 Coordinate system and coordinate parameters

图4 温室样本采集场景
Fig.4 Sample collection scene of greenhouse
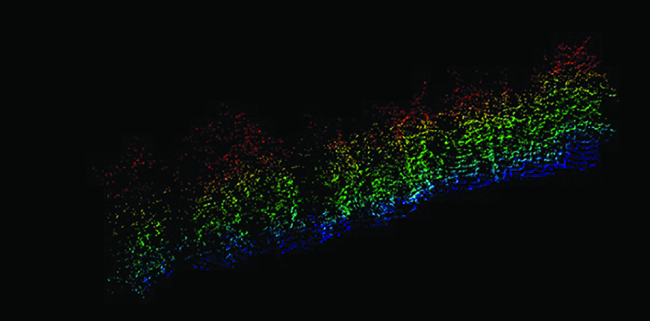
图5 番茄作物行点云示意
Fig.5 Schematic diagram of row point cloud of tomato crops
图6 相邻点云示意
Fig.6 Schematic diagram of adjacent point clouds
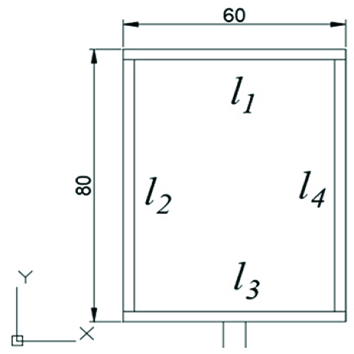
图7 规则框架示意 注:l1、l3方向为激光雷达前进方向,l2、l4方向为垂直于激光雷达前进方向
Fig.7 Schematic diagram of the rule framework Note: l1 and l3 are the forward direction of the lidar; l2 and l4 are the direction of vertical lidar
| 参数 Parameter | 人工 Manual (cm) | 平台 Platform (cm) | 相对误差 Relative error (%) |
|---|---|---|---|
| | 60.0 | 58.3 | -2.8 |
| | 80.0 | 76.4 | -4.5 |
| | 60.0 | 58.5 | -2.5 |
| | 80.0 | 77.3 | -3.4 |
表1 规则框架人工测量值与系统检测值对比
Table 1 Comparison table between the manual measurement value of rule support and the platform detection value
| 参数 Parameter | 人工 Manual (cm) | 平台 Platform (cm) | 相对误差 Relative error (%) |
|---|---|---|---|
| | 60.0 | 58.3 | -2.8 |
| | 80.0 | 76.4 | -4.5 |
| | 60.0 | 58.5 | -2.5 |
| | 80.0 | 77.3 | -3.4 |
| 编号 No. | 人工 Manual (m) | 平台 Platform (m) | 差值 Difference (m) |
|---|---|---|---|
| 1 | 0.70 | 0.73 | -0.03 |
| 2 | 0.73 | 0.75 | -0.02 |
| 3 | 0.59 | 0.64 | -0.05 |
| 4 | 0.50 | 0.56 | -0.06 |
| 5 | 0.66 | 0.73 | -0.07 |
| 6 | 0.75 | 0.76 | -0.01 |
| 7 | 0.55 | 0.58 | -0.03 |
| 8 | 0.45 | 0.49 | -0.04 |
| 9 | 0.57 | 0.54 | 0.03 |
| 10 | 0.81 | 0.84 | -0.03 |
| 11 | 0.69 | 0.74 | -0.05 |
| 12 | 0.57 | 0.58 | -0.01 |
| 13 | 0.70 | 0.70 | 0.00 |
| 14 | 0.60 | 0.63 | -0.03 |
| 15 | 0.61 | 0.58 | 0.03 |
| 16 | 0.49 | 0.45 | 0.04 |
| 17 | 0.53 | 0.59 | -0.06 |
| 18 | 0.62 | 0.65 | -0.03 |
| 19 | 0.60 | 0.65 | -0.05 |
| 20 | 0.62 | 0.65 | -0.03 |
| 21 | 1.67 | 1.68 | -0.01 |
| 22 | 1.59 | 1.63 | -0.04 |
| 23 | 1.6 | 1.71 | -0.11 |
| 24 | 1.74 | 1.76 | -0.02 |
| 25 | 1.60 | 1.58 | 0.02 |
| 26 | 1.65 | 1.60 | 0.05 |
| 27 | 1.45 | 1.45 | 0.00 |
| 28 | 1.60 | 1.64 | -0.04 |
| 29 | 1.72 | 1.75 | -0.03 |
| 30 | 1.63 | 1.64 | -0.01 |
| 31 | 1.50 | 1.56 | -0.06 |
| 32 | 1.54 | 1.56 | -0.02 |
| 33 | 1.60 | 1.65 | -0.05 |
| 34 | 1.54 | 1.57 | -0.03 |
| 35 | 1.67 | 1.69 | -0.02 |
| 36 | 1.69 | 1.65 | 0.04 |
| 37 | 1.68 | 1.67 | 0.01 |
| 38 | 1.70 | 1.74 | -0.04 |
| 39 | 1.68 | 1.69 | -0.01 |
| 40 | 1.74 | 1.73 | 0.01 |
表2 冠层高度人工测量值与平台检测值对比
Table 2 Comparison of canopy height measuredmanually with platform measured values
| 编号 No. | 人工 Manual (m) | 平台 Platform (m) | 差值 Difference (m) |
|---|---|---|---|
| 1 | 0.70 | 0.73 | -0.03 |
| 2 | 0.73 | 0.75 | -0.02 |
| 3 | 0.59 | 0.64 | -0.05 |
| 4 | 0.50 | 0.56 | -0.06 |
| 5 | 0.66 | 0.73 | -0.07 |
| 6 | 0.75 | 0.76 | -0.01 |
| 7 | 0.55 | 0.58 | -0.03 |
| 8 | 0.45 | 0.49 | -0.04 |
| 9 | 0.57 | 0.54 | 0.03 |
| 10 | 0.81 | 0.84 | -0.03 |
| 11 | 0.69 | 0.74 | -0.05 |
| 12 | 0.57 | 0.58 | -0.01 |
| 13 | 0.70 | 0.70 | 0.00 |
| 14 | 0.60 | 0.63 | -0.03 |
| 15 | 0.61 | 0.58 | 0.03 |
| 16 | 0.49 | 0.45 | 0.04 |
| 17 | 0.53 | 0.59 | -0.06 |
| 18 | 0.62 | 0.65 | -0.03 |
| 19 | 0.60 | 0.65 | -0.05 |
| 20 | 0.62 | 0.65 | -0.03 |
| 21 | 1.67 | 1.68 | -0.01 |
| 22 | 1.59 | 1.63 | -0.04 |
| 23 | 1.6 | 1.71 | -0.11 |
| 24 | 1.74 | 1.76 | -0.02 |
| 25 | 1.60 | 1.58 | 0.02 |
| 26 | 1.65 | 1.60 | 0.05 |
| 27 | 1.45 | 1.45 | 0.00 |
| 28 | 1.60 | 1.64 | -0.04 |
| 29 | 1.72 | 1.75 | -0.03 |
| 30 | 1.63 | 1.64 | -0.01 |
| 31 | 1.50 | 1.56 | -0.06 |
| 32 | 1.54 | 1.56 | -0.02 |
| 33 | 1.60 | 1.65 | -0.05 |
| 34 | 1.54 | 1.57 | -0.03 |
| 35 | 1.67 | 1.69 | -0.02 |
| 36 | 1.69 | 1.65 | 0.04 |
| 37 | 1.68 | 1.67 | 0.01 |
| 38 | 1.70 | 1.74 | -0.04 |
| 39 | 1.68 | 1.69 | -0.01 |
| 40 | 1.74 | 1.73 | 0.01 |
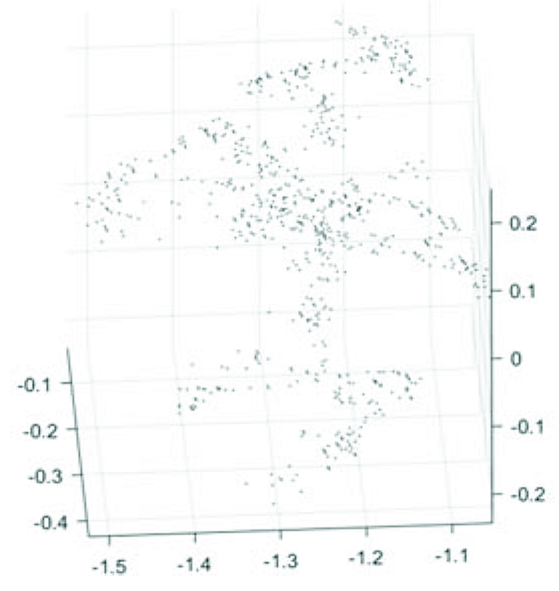
图8 单株番茄点云
Fig.8 Single tomato point cloud

图9 冠层高度检测值与测量值的线性模型
Fig.9 Linear model of detected and measured values of canopy height
| 编号 No. | 检测值 Detection value (m3) | 参考值 Reference value (m3) | 绝对误差 Absolute error (m3) | 相对误差 Relative error (%) |
|---|---|---|---|---|
| 1 | 0.019 0 | 0.022 3 | -0.003 3 | 14.8 |
| 2 | 0.017 2 | 0.019 2 | -0.002 0 | 10.4 |
| 3 | 0.022 1 | 0.025 2 | -0.003 1 | 12.3 |
| 4 | 0.027 6 | 0.031 7 | -0.004 1 | 12.9 |
| 5 | 0.016 1 | 0.019 0 | -0.002 9 | 15.3 |
| 6 | 0.020 3 | 0.024 2 | -0.003 9 | 16.1 |
| 7 | 0.016 6 | 0.018 9 | -0.002 3 | 12.2 |
| 8 | 0.019 7 | 0.023 4 | -0.003 7 | 15.8 |
| 9 | 0.023 4 | 0.026 3 | -0.002 9 | 11.0 |
| 10 | 0.026 9 | 0.030 6 | -0.003 7 | 12.1 |
| 11 | 0.074 6 | 0.090 2 | -0.015 6 | 17.3 |
| 12 | 0.073 9 | 0.087 1 | -0.013 2 | 15.2 |
| 13 | 0.069 2 | 0.083 1 | -0.013 9 | 16.7 |
| 14 | 0.076 7 | 0.094 1 | -0.017 4 | 18.5 |
| 15 | 0.081 0 | 0.094 6 | -0.013 6 | 14.4 |
| 16 | 0.071 4 | 0.087 4 | -0.016 0 | 18.3 |
| 17 | 0.065 7 | 0.079 8 | -0.014 1 | 17.7 |
| 18 | 0.069 4 | 0.087 6 | -0.018 2 | 20.8 |
| 19 | 0.083 2 | 0.097 6 | -0.014 4 | 14.8 |
| 20 | 0.076 4 | 0.095 1 | -0.018 7 | 19.7 |
| 平均值 Average value | -0.009 4 | 15.3 |
表3 番茄冠层体积平台检测值与参考值
Table 3 Detection value and reference value of tomato canopy volume platform
| 编号 No. | 检测值 Detection value (m3) | 参考值 Reference value (m3) | 绝对误差 Absolute error (m3) | 相对误差 Relative error (%) |
|---|---|---|---|---|
| 1 | 0.019 0 | 0.022 3 | -0.003 3 | 14.8 |
| 2 | 0.017 2 | 0.019 2 | -0.002 0 | 10.4 |
| 3 | 0.022 1 | 0.025 2 | -0.003 1 | 12.3 |
| 4 | 0.027 6 | 0.031 7 | -0.004 1 | 12.9 |
| 5 | 0.016 1 | 0.019 0 | -0.002 9 | 15.3 |
| 6 | 0.020 3 | 0.024 2 | -0.003 9 | 16.1 |
| 7 | 0.016 6 | 0.018 9 | -0.002 3 | 12.2 |
| 8 | 0.019 7 | 0.023 4 | -0.003 7 | 15.8 |
| 9 | 0.023 4 | 0.026 3 | -0.002 9 | 11.0 |
| 10 | 0.026 9 | 0.030 6 | -0.003 7 | 12.1 |
| 11 | 0.074 6 | 0.090 2 | -0.015 6 | 17.3 |
| 12 | 0.073 9 | 0.087 1 | -0.013 2 | 15.2 |
| 13 | 0.069 2 | 0.083 1 | -0.013 9 | 16.7 |
| 14 | 0.076 7 | 0.094 1 | -0.017 4 | 18.5 |
| 15 | 0.081 0 | 0.094 6 | -0.013 6 | 14.4 |
| 16 | 0.071 4 | 0.087 4 | -0.016 0 | 18.3 |
| 17 | 0.065 7 | 0.079 8 | -0.014 1 | 17.7 |
| 18 | 0.069 4 | 0.087 6 | -0.018 2 | 20.8 |
| 19 | 0.083 2 | 0.097 6 | -0.014 4 | 14.8 |
| 20 | 0.076 4 | 0.095 1 | -0.018 7 | 19.7 |
| 平均值 Average value | -0.009 4 | 15.3 |
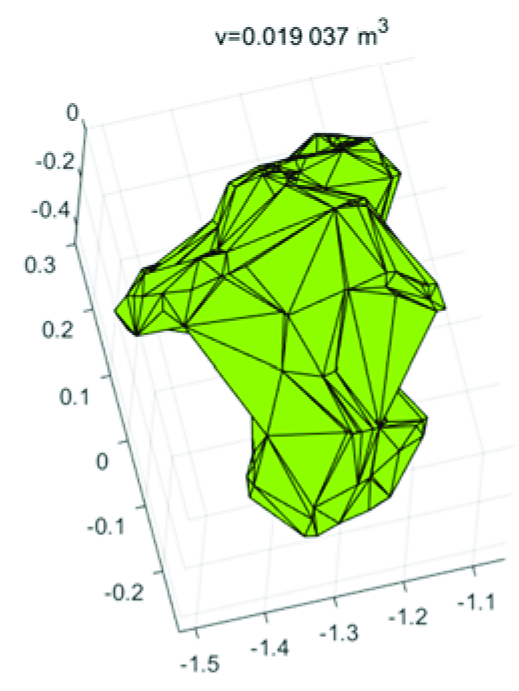
图10 作物冠层重建
Fig.10 Crop canopy reconstruction results
| 编号 No. | 人工 Manual (m3) | 平台 Platform (m3) | 相对误差 Relative error (%) |
|---|---|---|---|
| 1 | 0.022 6 | 0.019 0 | 15.9 |
| 2 | 0.025 9 | 0.022 1 | 14.6 |
| 3 | 0.095 2 | 0.076 7 | 19.4 |
| 4 | 0.098 6 | 0.081 0 | 17.8 |
| 5 | 0.097 8 | 0.076 4 | 21.9 |
表4 人工测量与平台检测体积对比
Table 4 Comparison table between manual measurement and platform detection volume
| 编号 No. | 人工 Manual (m3) | 平台 Platform (m3) | 相对误差 Relative error (%) |
|---|---|---|---|
| 1 | 0.022 6 | 0.019 0 | 15.9 |
| 2 | 0.025 9 | 0.022 1 | 14.6 |
| 3 | 0.095 2 | 0.076 7 | 19.4 |
| 4 | 0.098 6 | 0.081 0 | 17.8 |
| 5 | 0.097 8 | 0.076 4 | 21.9 |
| [1] | 王万章, 洪添胜, 李捷, 等. 果树农药精确喷雾技术[J]. 农业工程学报, 2004,(6):98-101. |
| WANG Wanzhang, HONG Tiansheng, LI Jie, et al. Precision spray technology of fruit tree pesticide[J]. Chinese Journal of Agricultural Engineering, 2004,(6):98-101. | |
| [2] | 邱白晶, 闫润, 马靖, 等. 变量喷雾技术研究进展分析[J]. 农业机械学报, 2015, 46(3):59-72. |
| QIU Baijing, YAN Run, MA Jing, et al. Journal of agricultural machinery, 2015, 46(3):59-72. | |
| [3] | 刘建刚, 赵春江, 杨贵军, 等. 无人机遥感解析田间作物表型信息研究进展[J]. 农业工程学报, 2016, 32(24):98-106. |
| LIU Jiangang, ZHAO Chunjiang, YANG Guijun, et al. Advances in the analysis of field crop phenotypic information by remote sensing using uavs[J]. Chinese journal of agricultural engineering, 2016, 32(24):98-106. | |
| [4] | Tumbo S D, Salyani M, Whitney J D, et al. Investigation of laser and ultrasonic ranging sensors for measurements of citrus canopy volume[J]. Applied Engineering in Agriculture, 2002, 18(3):367-372. |
| [5] | Li H, Zhai C, Weckler P, et al. A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors[J]. Sensors, 2017, 17(12):. |
| [6] | Hossein Maghsoudi, Saeid Minaei, Barat Ghobadian, et al. Ultrasonic sensing of pistachio canopy for low-volume precision spraying[J]. Computers and Electronics in Agriculture, 2015,(112):. |
| [7] | 翟长远, 赵春江, 王秀, 等. 树型喷洒靶标外形轮廓探测方法[J]. 农业工程学报, 2010, 26(12):173-177. |
| ZHAI Changyuan, ZHAO Chunjiang, WANG Xiu, et al. Journal of agricultural engineering, 2010, 26(12):173-177. | |
| [8] | Sylvain Jay, Gilles Rabatel, Xavier Hadoux, et al. In-field crop row phenotyping from 3D modeling performed using Structure from Motion[J]. Computers and Electronics in Agriculture, 2015,(110):. |
| [9] | 赵源深. 西红柿采摘机器人目标识别、定位与控制技术研究[D]. 上海:上海交通大学, 2018. |
| ZHAO Yuanshen. Research on target recognition, location and Control Technology of Tomato picking Robot[D]. Shanghai: Shanghai Jiao Tong University, 2018. | |
| [10] | 刘慧, 李宁, 沈跃, 等. 模拟复杂地形的喷雾靶标激光检测与三维重构[J]. 农业工程学报, 2016, 32(18):84-91. |
| LIU Hui, LI Ning, SHEN Yue, et al. Laser detection and 3D reconstruction of spray targets for complex terrain[J]. Chinese Journal of agricultural engineering, 2016, 32(18):84-91. | |
| [11] |
Saeys W, Lenaerts B, Craessaerts G, et al. Estimation of the crop density of small grains using Li DAR sensors[J]. Biosystems Engineering, 2009, 102(1):22-30.
DOI URL |
| [12] |
LI Xudong, ZHAO Huijie, LIU Yang, et al. Laser scanning based three dimensional measurement of vegetation canopy structure[J]. Optics and Lasers in Engineering, 2014, 54(1):152-158.
DOI URL |
| [13] | LIU Shouyang, Baret Fred, Abichou Mariem, et al. Estimating wheat green area index from ground-based LiDAR measurement using a 3D canopy structure model[J]. Agricultural and Forest Meteorology, 2017, (247):12-20. |
| [14] | 张会霞, 陈宜金, 刘国波. 基于三维激光扫描仪的校园建筑物建模研究[J]. 测绘工程, 2010, 19(1):32-34, 38. |
| ZHANG Huixia, CHEN Yijin, LIU Guobo. Research on campus building modeling based on 3d laser scanner[J]. Surveying and mapping engineering, 2010, 19(1):32-34, 38. | |
| [15] | Llop Jordi, Gil Emilio, Llorens Jordi, et al. Testing the Suitability of a Terrestrial 2D LiDAR Scanner for Canopy Characterization of Greenhouse Tomato Crops[J]. Sensors (Basel, Switzerland), 2016, 16(9):. |
| [16] | 俞龙, 黄健, 赵祚喜, 等. 丘陵山地果树冠层体积激光测量方法与试验[J]. 农业机械学报, 2013, 44(8):224-228. |
| YU Long, HUANG Jian, ZHAO Zuoxi, et al. Journal of agricultural machinery, 2013, 44(08):224-228. | |
| [17] | 吴志鹏, 付威, 娄朝霞, 等. 基于激光雷达的枣树轮廓测量平台的设计与试验[J]. 农机化研究, 2020, 42(12):52-57. |
| WU Zhipeng, FU Wei, LOU Zhaoxia, et al. Design and test of a lidar based profile measurement platform for jujube[J]. Agricultural mechanization research, 2020, 42(12):52-57. | |
| [18] | 张美娜, 吕晓兰, 邱威, 等. 基于三维激光点云的靶标叶面积密度计算方法[J]. 农业机械学报, 2017, 48(11):172-178. |
| ZHANG Meina, LÜ Xiaolan, QIU Wei, et al. Chinese journal of agricultural machinery[J], 2017, 48(11):172-178. | |
| [19] | Ravi, R, Lin Y J, Shamseldin T, et al. Implementation of UAV-Based lidar for high throughput phenotyping[C]. Valencia: IEEE, 2018: 8761-8764. |
| [20] | 管贤平, 刘宽, 邱白晶, 等. 基于机载三维激光扫描的大豆冠层几何参数提取[J]. 农业工程学报, 2019, 35(23):96-103. |
| GUAN Xianping, LIU Kuan, QIU Baijing, et al. Geometric parameters extraction of soybean canopy based on airborne 3d laser scanning[J]. Chinese journal of agricultural engineering, 2019, 35(23):96-103. | |
| [21] | 张立富, 吕东方, 袁明, 等. 3D激光扫描技术及其在森林测绘中的应用研究[J]. 林业机械与木工设备, 2011, 39(8):30-32, 35. |
| ZHANG Lifu, LÜ Dongfang, YUAN Ming, et al. Research on 3D laser scanning technology and its application in forest mapping[J]. Forestry machinery and woodworking equipment, 2011, 39(8):30-32, 35. | |
| [22] | 刘盈, 吕开云. 基于四参数-ICP的点云配准研究[J]. 江西测绘, 2018,(2):61-64. |
| LIU Ying, LÜ Kaiyun. Point Cloud Registration Based on four-parameter ICP[J]. Jiangxi Surveying and Mapping, 2018,(2):61-64. | |
| [23] | 李希, 韩燮, 熊风光. 基于RANSAC和TLS的点云平面拟合[J]. 计算机工程与设计, 2017, 38(1):123-126, 143. |
| LI Xi, HAN Xie, XIONG Fengguang. Point cloud plane fitting based on RANSAC and TLS[J]. Computer engineering and design, 2017, 38(1):123-126, 143. | |
| [24] | 程效军, 唐剑波. 基于最小二乘拟合的墙面平整度检测方法[J]. 测绘信息与工程, 2007,(4):19-20. |
| CHENG Xiaojun, TANG Jianbo. Wall Flatness Detection Method based on least-squares Fitting[J]. Surveying and Mapping Information and Engineering, 2007,(4):19-20. | |
| [25] | 薄怀志. 三种点云数据平面拟合方法的精度比较与分析[J]. 测绘与空间地理信息, 2018, 41(5):206-208. |
| BO Huaizhi. Precision Comparison and Analysis of three plane fitting methods for point cloud data[J]. Surveying and Mapping and Spatial Geographic Information, 2008, 41(5):206-208. | |
| [26] | 刘庆一. 基于水平集与多图谱的医学图像分割算法研究[D]. 济南:山东大学, 2019. |
| LIU Qingyi. Research on medical Image segmentation Algorithm based on Horizontal set and Multi-atlas[D]. Jinan:Shandong University, 2019. | |
| [27] | 高佳丽. 基于交通视频的目标检测与跟踪算法研究[D]. 西安:长安大学, 2019. |
| GAO Jiali. Research on Target Detection and Tracking Algorithm based on traffic video [D]. Xi'an: Chang 'an University, 2019. | |
| [28] | André F. Colaço, Rodrigo G. Trevisan, José P. Molin, J, et al. A Method to Obtain Orange Crop Geometry Information Using a Mobile Terrestrial Laser Scanner and 3D Modeling[J]. Remote Sensing, 2017, 9(8):. |
| [29] |
Bernardini F, Mittleman J, Rushmeier H, et al. The ball-pivoting algorithm for surface reconstruction[J]. IEEE Transactions on Visualization and Computer Graphics, 1999, 5(4):349-359.
DOI URL |
| [30] | 马立平. 现代统计分析方法的学与用(十)—多元线性回归分析[J]. 北京统计, 2000,(10):38-39. |
| MA Liping. The study and Application of modern statistical Analysis methods (X) - Multiple Linear regression analysis[J]. Beijing Statistics, 2000,(10):38-39. |
| [1] | 张彩虹, 王国强, 姜鲁艳, 刘涛, 德贤明. 低能耗组装式深冬生产型日光温室环境因子变化及番茄性状分析[J]. 新疆农业科学, 2024, 61(8): 2043-2053. |
| [2] | 曲延斌, 王振锡, 胡天祺, 董巍, 陈哲. 基于机载激光雷达影像的天山云杉林树高提取及蓄积量反演[J]. 新疆农业科学, 2023, 60(4): 958-964. |
| [3] | 刘凯, 吴晓, 桑思语, 许红军, 高杰. 保温被揭盖方式对日光温室内部温度的影响[J]. 新疆农业科学, 2023, 60(3): 633-642. |
| [4] | 齐亚聪, 陈毅飞, 杨会民, 王学农. 基于三维激光点云的靶标探测系统研究与试验[J]. 新疆农业科学, 2023, 60(11): 2833-2841. |
| [5] | 张锦强, 苏学德, 李鹏程, 杨湘, 李铭, 郭绍杰. 一年两熟夏黑葡萄日光温室温度变化与果实品质差异性分析[J]. 新疆农业科学, 2022, 59(8): 1889-1895. |
| [6] | 马永杰, 王星怡, 韩聪颖, 蔺玉红, 马慧, 张雪艳. 日光温室后墙自走式雾化降温机夏季降温效果评价[J]. 新疆农业科学, 2022, 59(4): 1016-1024. |
| [7] | 韩坤林, 王钊英, 杨会民, 陈毅飞, 蒋永新, 张佳喜. 基于PCA-BPNN的温室番茄果实直径预测模型[J]. 新疆农业科学, 2022, 59(2): 485-492. |
| [8] | 马月虹, 李保明, 李慧霜. 新疆砌块复合墙体和砖墙日光温室的传热数值模拟分析[J]. 新疆农业科学, 2022, 59(2): 493-501. |
| [9] | 阮康, 王香茹, 贵会平, 董强, 李磊磊, 魏学文, 张西岭, 张恒恒, 宋美珍. 新疆“宽早优”模式下施氮量对棉田碳足迹的影响[J]. 新疆农业科学, 2021, 58(9): 1633-1641. |
| [10] | 杨征鹤, 杨会民, 喻晨, 陈毅飞, 周欣, 马艳, 王学农. 设施蔬菜自动对靶喷药技术研究现状与分析[J]. 新疆农业科学, 2021, 58(8): 1547-1557. |
| [11] | 肖林刚, 宋兵伟, 曹新伟, 王瑞, 焦锐斌. 日光温室冬季加温热负荷的计算和热风炉补温试验验证[J]. 新疆农业科学, 2021, 58(5): 903-910. |
| [12] | 宋羽, 蒋程瑶, 李玉姗. 不同叶背补光模式对戈壁温室番茄品质的影响[J]. 新疆农业科学, 2021, 58(2): 294-303. |
| [13] | 陈毅飞, 杨会民, 马艳, 张新伟, 喻晨, 王学农. 基于多层感知机的温室内番茄茎直径变化预测模型[J]. 新疆农业科学, 2020, 57(3): 562-571. |
| [14] | 宋兵伟, 吴乐天, 慈军, 王亮. 不同固化剂对新疆非耕地戈壁土的力学性能影响[J]. 新疆农业科学, 2020, 57(3): 572-580. |
| [15] | 马月虹, 李保明, 王国强, 宋兵伟, 刘娜. 新疆日光温室前屋面的风载数值模拟分析[J]. 新疆农业科学, 2020, 57(12): 2325-2331. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||