
Xinjiang Agricultural Sciences ›› 2024, Vol. 61 ›› Issue (12): 3032-3041.DOI: 10.6048/j.issn.1001-4330.2024.12.018
• Soil Fertilizer · Storage and Preservation Processing · Horticultural Special Local Products • Previous Articles Next Articles
WANG Zhenlu1( ), BAI Tao1,2(), LI Dongya1, DAI Shuo1, CHEN Zhen1
), BAI Tao1,2(), LI Dongya1, DAI Shuo1, CHEN Zhen1
Received:2024-05-11
Online:2024-12-20
Published:2025-01-16
Correspondence author:
BAI Tao
Supported by:
王震鲁1(), 白涛1,2(), 李东亚1, 戴硕1, 陈珍1
通讯作者:
白涛
作者简介:王震鲁(2000-),男,山东济宁人,硕士研究生,研究方向为计算机视觉、物联网,(E-mail)2425387367@qq.com
基金资助:CLC Number:
WANG Zhenlu, BAI Tao, LI Dongya, DAI Shuo, CHEN Zhen. Green chili pepper target detection method based on improved YOLOv5[J]. Xinjiang Agricultural Sciences, 2024, 61(12): 3032-3041.
王震鲁, 白涛, 李东亚, 戴硕, 陈珍. 基于改进YOLOv5的绿辣椒目标检测方法[J]. 新疆农业科学, 2024, 61(12): 3032-3041.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.xjnykx.com/EN/10.6048/j.issn.1001-4330.2024.12.018

Fig.1 Chili pepper dataset (partial)
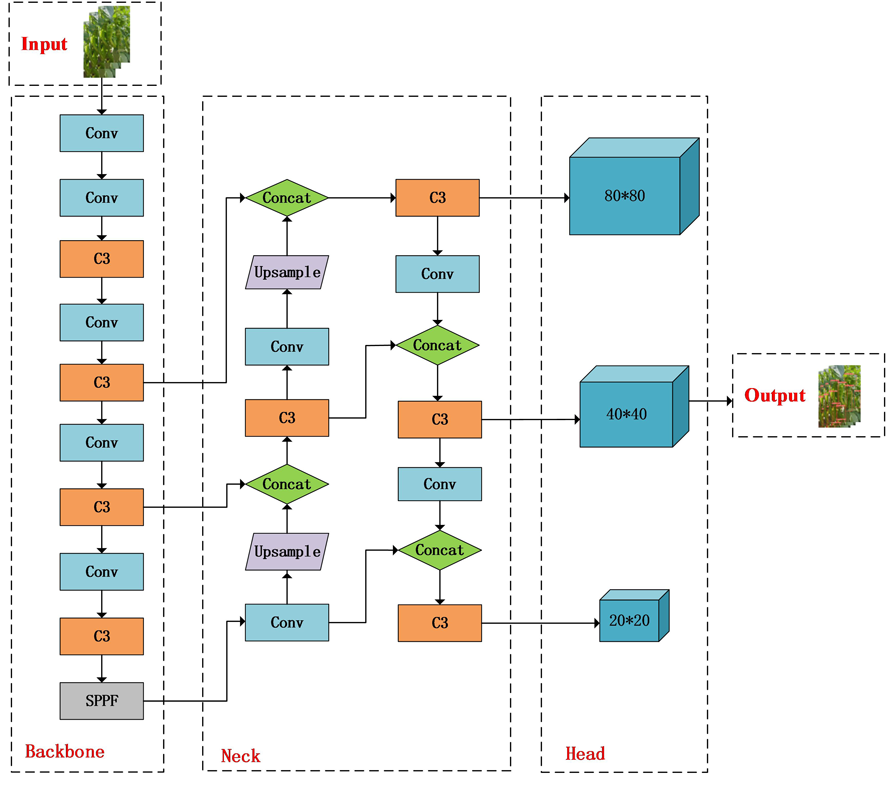
Fig.2 YOLOv5 network structure diagram
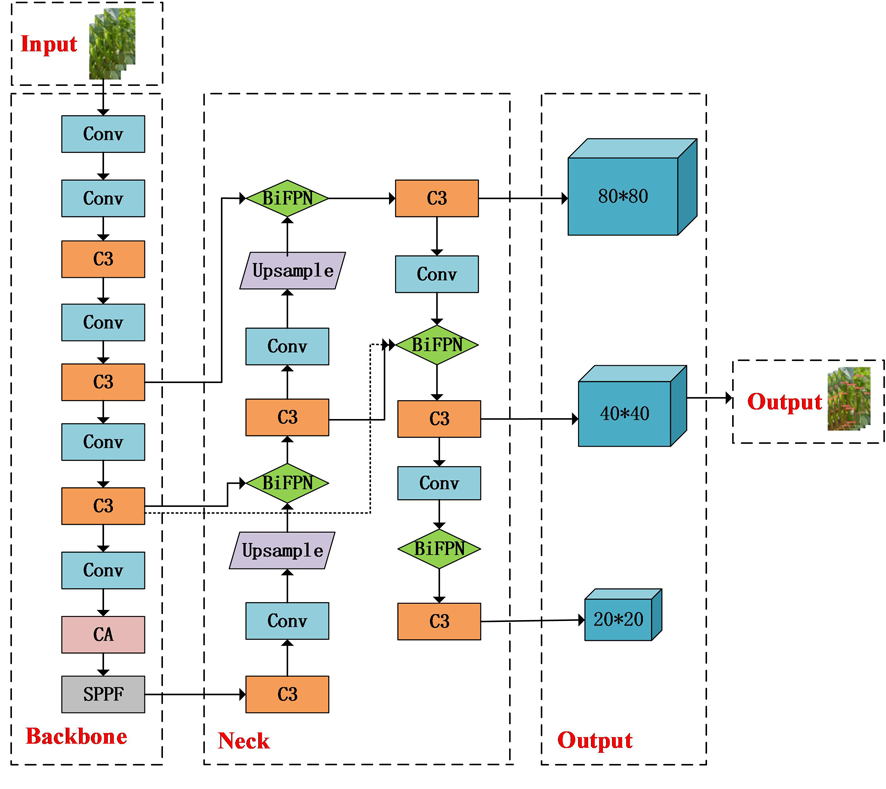
Fig.3 Improvement of YOLOv5 network structure diagram
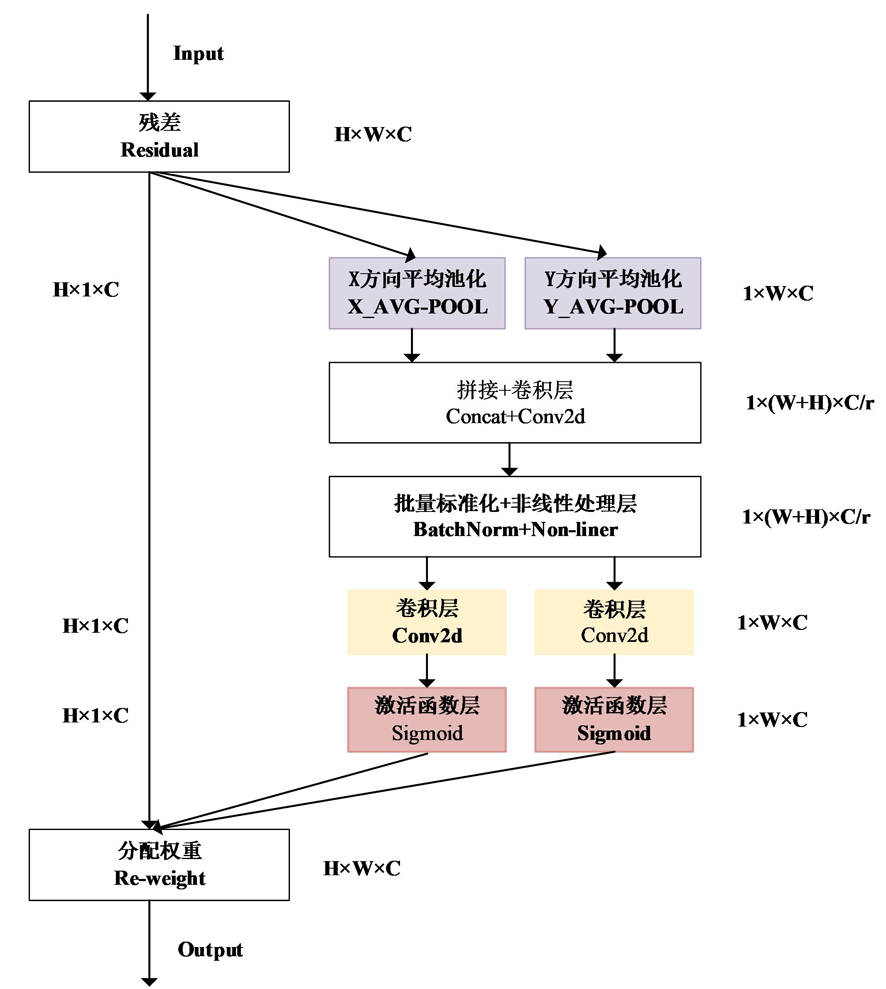
Fig.4 Diagram of the coordinate attention module
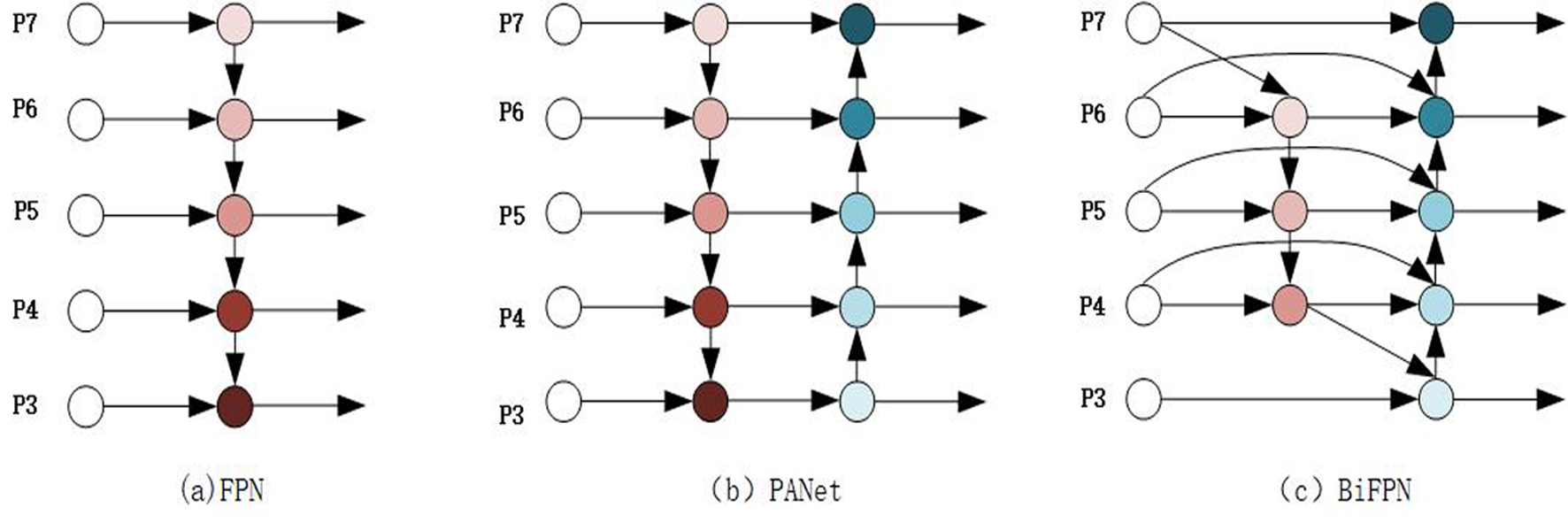
Fig.5 Structure of different characteristic pyramids
| 参数项 Parameter items | 数值 Numerical value |
|---|---|
| Epochs | 150 |
| Batch-size | 64 |
| Img-size | 640 |
| Learn_rate | 0.01 |
| 优化器Optimizer | SGD |
Tab.1 Training parameters
| 参数项 Parameter items | 数值 Numerical value |
|---|---|
| Epochs | 150 |
| Batch-size | 64 |
| Img-size | 640 |
| Learn_rate | 0.01 |
| 优化器Optimizer | SGD |
| 模型 Model | 平均精确率 Average accuracy (%) | 参数量 Parameter quantity (M) | 权重大小 Weight size (M) |
|---|---|---|---|
| Faster-RCNN | 89.6 | 137.1 | 108.2 |
| YOLOv5s | 89.5 | 7.01 | 13.7 |
| YOLOv7 | 90.4 | 37.1 | 71.3 |
| YOLOv8s | 90.3 | 11.1 | 21.5 |
| Ours | 91.0 | 7.1 | 14.0 |
Tab.2 Comparison results of different models
| 模型 Model | 平均精确率 Average accuracy (%) | 参数量 Parameter quantity (M) | 权重大小 Weight size (M) |
|---|---|---|---|
| Faster-RCNN | 89.6 | 137.1 | 108.2 |
| YOLOv5s | 89.5 | 7.01 | 13.7 |
| YOLOv7 | 90.4 | 37.1 | 71.3 |
| YOLOv8s | 90.3 | 11.1 | 21.5 |
| Ours | 91.0 | 7.1 | 14.0 |

Fig.6 Comparison of test results
| 模型 Model | 平均精确率 Average accuracy (%) | 精确率 Accuracy (%) | 召回率 Recall (%) |
|---|---|---|---|
| YOLOv5s+GAM | 89.2 | 87.3 | 87.7 |
| YOLOv5s+EMA | 89.6 | 87.8 | 87.7 |
| YOLOv5s+CA | 89.9 | 86.9 | 89.7 |
Tab.3 Comparison results of attention modules
| 模型 Model | 平均精确率 Average accuracy (%) | 精确率 Accuracy (%) | 召回率 Recall (%) |
|---|---|---|---|
| YOLOv5s+GAM | 89.2 | 87.3 | 87.7 |
| YOLOv5s+EMA | 89.6 | 87.8 | 87.7 |
| YOLOv5s+CA | 89.9 | 86.9 | 89.7 |

Fig.7 Training chart for different attention modules
| 模型 Model | 平均精确率 Average accuracy (%) | 召回率 Recall (%) | 平均精确率 Average accuracy (%) |
|---|---|---|---|
| YOLOv5s | 88.5 | 88.2 | 89.5 |
| YOLOv5s+CA | 86.9 | 89.7 | 89.9 |
| YOLOv5s+BiFPN | 87.2 | 88.8 | 90.7 |
| Ours | 89.4 | 87.5 | 91.0 |
Tab.4 Comparative results of ablation experiments
| 模型 Model | 平均精确率 Average accuracy (%) | 召回率 Recall (%) | 平均精确率 Average accuracy (%) |
|---|---|---|---|
| YOLOv5s | 88.5 | 88.2 | 89.5 |
| YOLOv5s+CA | 86.9 | 89.7 | 89.9 |
| YOLOv5s+BiFPN | 87.2 | 88.8 | 90.7 |
| Ours | 89.4 | 87.5 | 91.0 |
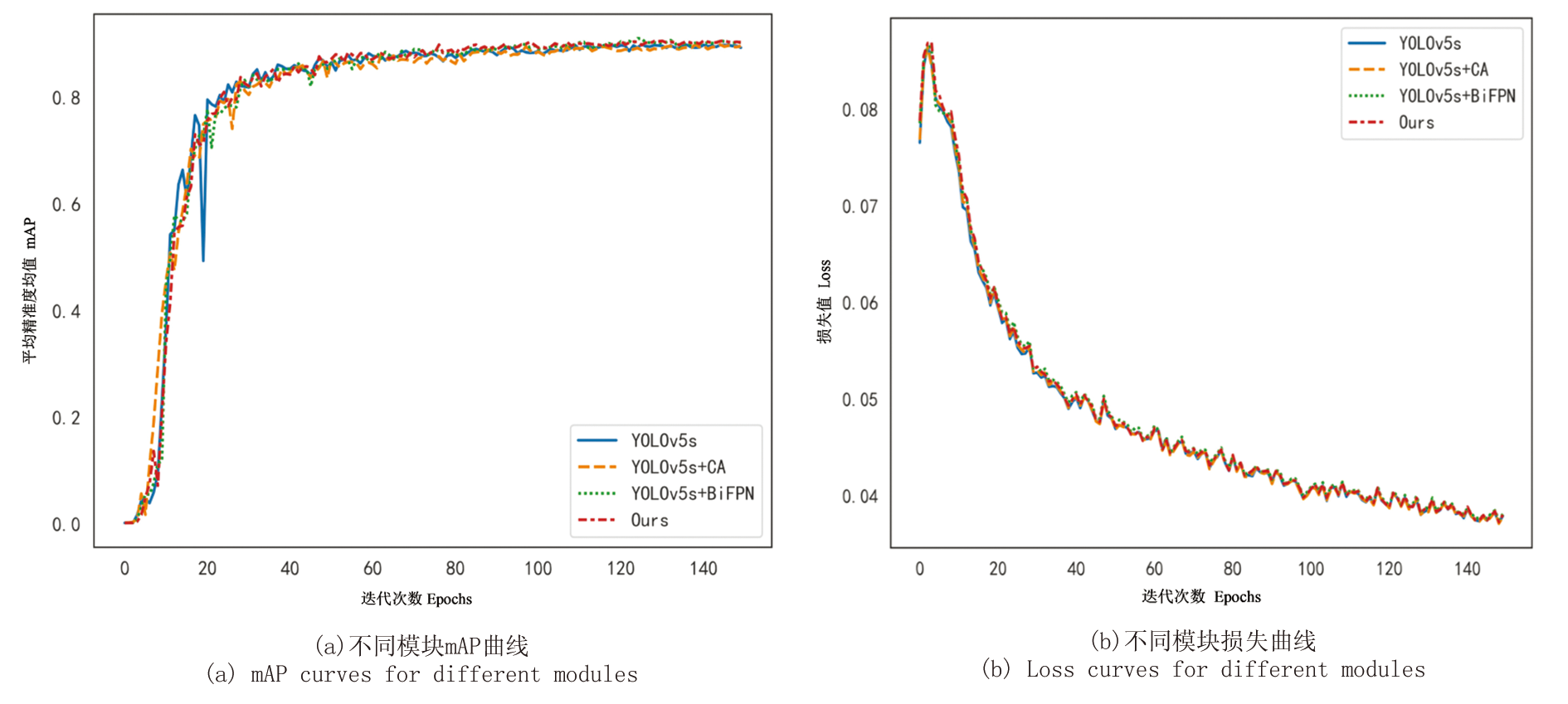
Fig.8 Graph of training results of different modules
| [1] | 张子峰. 我国辣椒产业发展现状、主要挑战与应对之策[J]. 北方园艺, 2023,(14): 153-158. |
| ZHANG Zifeng. Current development situation, main challenges and its countermeasures of the pepper industry in China[J]. Northern Horticulture, 2023,(14): 153-158. | |
| [2] | 段洁利, 王昭锐, 叶磊, 等. 水果采摘机械臂运动规划研究进展与发展趋势[J]. Journal of Intelligent Agricultural Mechanization(in Chinese and English), 2021, (2): 7-17. |
| DUAN Jieli, WANG Zhaorui, YE Lei, et al. Research progress and development trend of motion planning of fruit picking robot arm[J]. Journal of Intelligent Agricultural Mechanization, 2021, (2): 7-17. | |
| [3] | 金晶, 张小明, 付浩. 贵州省辣椒产业发展现状及建议[J]. 北方园艺, 2021,(21): 152-156. |
| JIN Jing, ZHANG Xiaoming, FU Hao. Status and suggestions of chili industry development in Guizhou Province[J]. Northern Horticulture, 2021,(21): 152-156. | |
| [4] | Kang D, Benipal S S, Gopal D L, et al. Hybrid pixel-level concrete crack segmentation and quantification across complex backgrounds using deep learning[J]. Automation in Construction, 2020, 118: 103291. |
| [5] | 韩文霆, 崔家伟, 崔欣, 等. 基于特征优选与机器学习的农田土壤含盐量估算研究[J]. 农业机械学报, 2023, 54(3): 328-337. |
| HAN Wenting, CUI Jiawei, CUI Xin, et al. Estimation of farmland soil salinity content based on feature optimization and machine learning algorithms[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(3): 328-337. | |
| [6] | 陈小毛, 王立成, 张健, 等. 融合YOLOv5与ASFF算法的海产品目标检测算法研究[J]. 无线电工程, 2023, 53(4): 824-830. |
| CHEN Xiaomao, WANG Licheng, ZHANG Jian, et al. Research on seafood object detection algorithm integrating YOLOv5 and ASFF algorithm[J]. Radio Engineering, 2023, 53(4): 824-830. | |
| [7] | 周岳淮, 李震, 左嘉明, 等. 基于改进YOLOv5s模型的山地果园单轨运输机搭载柑橘的检测[J]. 湖南农业大学学报(自然科学版), 2023, 49(4): 491-496. |
| ZHOU Yuehuai, LI Zhen, ZUO Jiaming, et al. Detection of Citrus carried by mountainous orchard monorail transporter based on improved YOLOv5s[J]. Journal of Hunan Agricultural University (Natural Sciences), 2023, 49(4): 491-496. | |
| [8] | Tian Y N, Yang G D, Wang Z, et al. Apple detection during different growth stages in orchards using the improved YOLO-V3 model[J]. Computers and Electronics in Agriculture, 2019, 157: 417-426. |
| [9] | 段洁利, 王昭锐, 邹湘军, 等. 采用改进YOLOv5的蕉穗识别及其底部果轴定位[J]. 农业工程学报, 2022, 38(19): 122-130. |
| DUAN Jieli, WANG Zhaorui, ZOU Xiangjun, et al. Recognition of bananas to locate bottom fruit axis using improved YOLOv5[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(19): 122-130. | |
| [10] | Wang F H, Sun Z X, Chen Y, et al. Xiaomila green pepper target detection method under complex environment based on improved YOLOv5s[J]. Agronomy, 2022, 12(6): 1477. |
| [11] | 王圆圆, 林建, 王姗. 基于YOLOv4-tiny模型的水稻早期病害识别方法[J]. 江苏农业科学, 2023, 51(16): 147-154. |
| WANG Yuanyuan, LIN Jian, WANG Shan. An early rice disease recognition method based on YOLOv4-tiny model[J]. Jiangsu Agricultural Sciences, 2023, 51(16): 147-154. | |
| [12] | Tang Z, Zhou L, Qi F, et al. An improved lightweight and real-time YOLOv5 network for detection of surface defects on Indocalamus leaves[J]. Journal of Real-Time Image Processing, 2023, 20(1): 14. |
| [13] | 高芳征, 汤文俊, 陈光明, 等. 基于改进YOLOv3的复杂环境下西红柿成熟果实快速识别[J]. 中国农机化学报, 2023, 44(8): 174-183. |
|
GAO Fangzheng, TANG Wenjun, CHEN Guangming, et al. Fast recognition of ripe tomato fruits in complex environment based on improved YOLOv3[J]. Journal of Chinese Agricultural Mechanization, 2023, 44(8): 174-183.
DOI |
|
| [14] | 朱立成, 韩振浩, 赵博, 等. 基于VINS-MONO和改进YOLO v4-Tiny的果园自主寻筐方法[J]. 农业机械学报, 2023, 54(8): 97-109. |
| ZHU Licheng, HAN Zhenhao, ZHAO Bo, et al. Autonomous basket searching method for orchards transporter based on VINS-MONO and improved YOLO v4-tiny[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(8): 97-109. | |
| [15] |
He K M, Zhang X Y, Ren S Q, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916.
DOI PMID |
| [16] | 汤文虎, 吴龙, 黎尧, 等. 基于改进Faster RCNN的钢线圈头部小目标检测算法[J]. 现代制造工程, 2023, (8): 127-133, 147. |
| TANG Wenhu, WU Long, LI Yao, et al. Improved faster RCNN based steel coil head detection algorithm for small objects[J]. Modern Manufacturing Engineering, 2023, (8): 127-133, 147. | |
| [17] | 吕宗旺, 邱帅欣, 孙福艳, 等. 基于改进YOLOv5s的轻量化储粮害虫检测方法[J]. 中国粮油学报, 2023, 38(8): 221-228. |
| LYU Zongwang, QIU Shuaixin, SUN Fuyan, et al. Lightweight grain storage pest detection method based on improved YOLOv5s[J]. Journal of the Chinese Cereals and Oils Association, 2023, 38(8): 221-228. | |
| [18] | 李淑菲, 李凯雨, 乔岩, 等. 基于可见光光谱和改进YOLOv5的自然场景下黄瓜病害检测方法[J]. 光谱学与光谱分析, 2023, 43(8): 2596-2600. |
| LI Shufei, LI Kaiyu, QIAO Yan, et al. Cucumber disease detection method based on visible light spectrum and improved YOLOv5 in natural scenes[J]. Spectroscopy and Spectral Analysis, 2023, 43(8): 2596-2600. | |
| [19] | Hong W W, Ma Z H, Ye B L, et al. Detection of green Asparagus in complex environments based on the improved YOLOv5 algorithm[J]. Sensors, 2023, 23(3): 1562. |
| [20] | 杨国亮, 王吉祥, 聂子玲. 基于改进型YOLOv5s的番茄实时识别方法[J]. 江苏农业科学, 2023, 51(15): 187-193. |
| YANG Guoliang, WANG Jixiang, NIE Ziling. A real-time tomato recognition method based on improved YOLOv5s[J]. Jiangsu Agricultural Sciences, 2023, 51(15): 187-193. | |
| [21] | 李尚平, 郑创锐, 文春明, 等. 基于改进YOLO v5s的甘蔗切种茎节特征识别定位技术[J]. 农业机械学报, 2023, 54(10): 234-245,293. |
| LI Shangping, ZHENG Chuangrui, WEN Chunming, et al. Stem node feature recognition and positioning technology for transverse cutting of sugarcane based on improved YOLO v5s[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(10): 234-245,293. | |
| [22] | 姜国权, 杨正元, 霍占强, 等. 基于改进YOLOv5网络的疏果前苹果检测方法[J]. 江苏农业科学, 2023, 51(14): 205-215. |
| JIANG Guoquan, YANG Zhengyuan, HUO Zhanqiang, et al. Apple detection method before thinning fruit based on improved YOLOv5 model[J]. Jiangsu Agricultural Sciences, 2023, 51(14): 205-215. | |
| [23] | Zhe T, Lin Z, Fang Q, et al. An improved lightweight and real-time YOLOv5 network for detection of surface defects on indocalamus leaves[J]. Journal of Real-Time Image Processing, 2023, 20(1). |
| [24] | 杨永闯, 王昊, 王新良. 基于改进SSD的食物浪费行为识别方法[J]. 计算机工程与设计, 2023, 44(8): 2523-2530. |
| YANG Yongchuang, WANG Hao, WANG Xinliang. Food waste behavior recognition method based on improved SSD[J]. Computer Engineering and Design, 2023, 44(8): 2523-2530. | |
| [25] | 郭殿鹏, 柯海森, 李孝禄, 等. 基于改进YOLOv7的织物疵点检测算法[J]. 棉纺织技术, 2023, 51(12): 5-11. |
| GUO Dianpeng, KE Haisen, LI Xiaolu, et al. Fabric defect detection algorithm based on improved YOLOv7[J]. Cotton Textile Technology, 2023, 51(12): 5-11. | |
| [26] | 崔海彬, 蒲东兵, 陆云凤, 等. 基于CA-YOLO的安全帽佩戴检测[J]. 东北师大学报(自然科学版), 2023, 55(3): 94-100. |
| CUI Haibin, PU Dongbing, LU Yunfeng, et al. Helmet wearing detection based on CA-YOLO[J]. Journal of Northeast Normal University (Natural Science Edition), 2023, 55(3): 94-100. |
| [1] | Abudoukeyoumu·Abudourezike, GAO Qiang, XU Lin, ZHANG Xuechao, WANG Li, YAN Qingqing, ZHANG Yan, Gulimila Aikebaier, NIE Qiuhai. Effects of Shading on the Physiological Characteristics of Taraxacum kok-saghyz Rodin [J]. Xinjiang Agricultural Sciences, 2020, 57(11): 2126-2134. |
| [2] | Halidan Yikeremu, HUANG Tian-rong, ZHOU An-ding ,GAO Yong-hong, FANG Hui, FAN Gui-qiang, WU Xin-yuan. Molecular Identification of Genes Related to Growth and Development Characteristics of Winter Wheat under Shading Condition [J]. Xinjiang Agricultural Sciences, 2019, 56(4): 624-631. |
| [3] | ZHANG Hong-zhi, Aizizi Julaiti, CUI Yue, ZHAO QI, KONG De-peng, HU Ai-zhi,WANG Li-hong, WANG Zhong, ZHANG Yue-qiang, FAN Zhe-ru, LI Jian-feng. Effect of Shading on the Photosynthetic Characteristics and Yield in Winter Wheat in Southern Xinjiang [J]. Xinjiang Agricultural Sciences, 2019, 56(10): 1765-1771. |
| [4] | FANG Hui, FAN Gui-qiang, GAO Yong-hong, ZHOU An-ding, WU Xin-yuan, ZHANG Yong-qiang, LU Jing, HUANG Tian-rong. Effects of Shading on Grain-Filling and Quality Characteristics of Different Winter Wheat Varieties [J]. Xinjiang Agricultural Sciences, 2018, 55(9): 1593-1600. |
| [5] | Sajidan Abudukerimu, Batur Bake, Akrem Ahmet, Zulikeyan Manaf, WANG Meng-hui, LUO Na-na. Effects of Different Dust Stresses and Shading Treatment Gradients on Organic Osmotic Adjustment Substances of Four Kinds of Fruit Tree Leaves [J]. Xinjiang Agricultural Sciences, 2017, 54(8): 1460-1468. |
| [6] | Aizizi Julaiti;CUI Yue;ZHAO Qi;ZHANG Hong-zhi;FAN Zhe-ru;LI Jian-feng;WANG Zhong. Effects of Shading and Nitrogen Fertilizer on the Population Growth Dynamics and Yield of Winter Wheat [J]. , 2017, 54(5): 785-794. |
| [7] | ZHANG Yong-qiang, CHENG Xing-wu, Sailihan Sai, XUE Li-hua, LEI Jun-jie. Effects of Shading and Planting Density on Photosynthetic Characteristics of Flag Leaves during Filling Stage of Winter Wheat under Drip Irrigation [J]. Xinjiang Agricultural Sciences, 2017, 54(12): 2164-2173. |
| [8] | . Effect of Nitrogen Levels on the Growth, Development and Yield of Cotton under Shading Conditions [J]. , 2013, 50(10): 1765-1772. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||